Lane Keeping and Traffic Sign Recognition
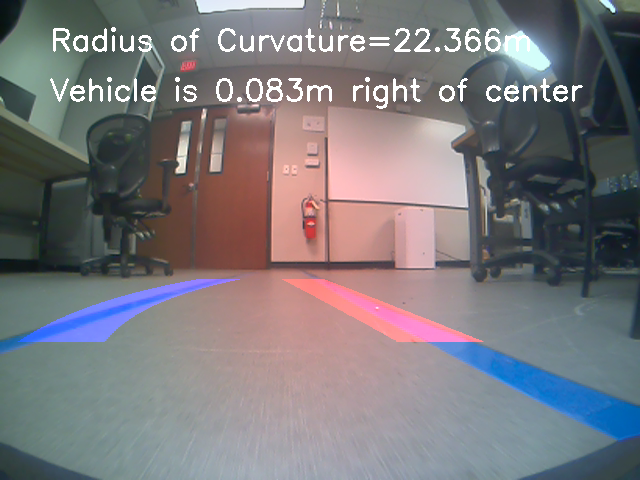
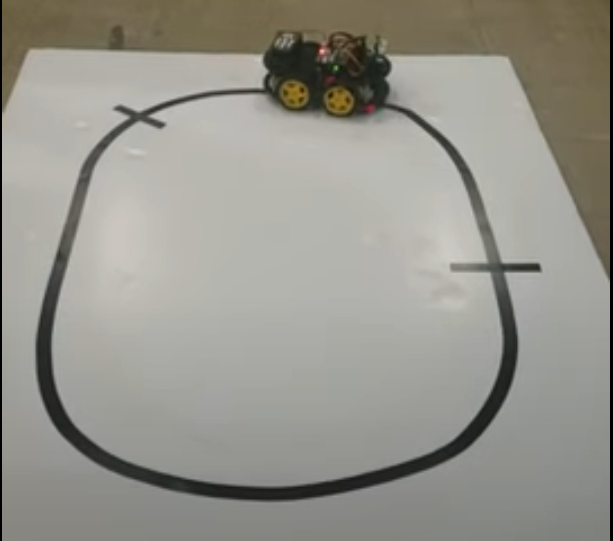
Table of Contents Project Overview In this project, a 1/10th scale RC car uses computer vision techniques to perform lane keeping (staying in the middle of two lane lines) using the camera feed as input. In order to perform feedback control to keep the vehicle in the center of the lane lines, the geometry of … Read more