Skip to content
Ashwin Vadivel
Robotics – Computer Vision – Machine Learning
Menu
Menu
Home
Contact Me
About Me
Projects
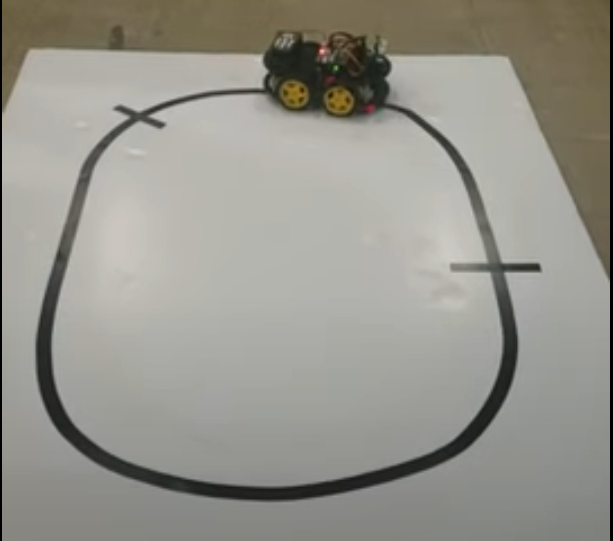
Line Following Robot with Collision Avoidance
October 16, 2021
by
ashwinv96