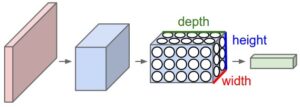
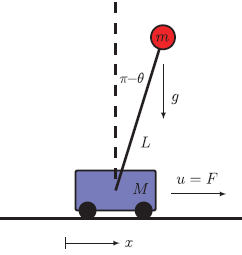
Projects All Computer Vision Machine Learning Robotics/Control Lane Keeping and Traffic Sign Recognition Virtual Graffiti Using Image Projection 2D Quadrotor Control Through Reinforcement Learning Stereo Image Rectification Quadrotor – Dynamical Modelling and Control 3D Reconstruction from RGB-D Camera Ship Detection and Tracking – GPS Trajectory from Video Line Following Robot with Collision Avoidance Dog Cat Convnet CNNs – In depth analysis Multi-UAV Drone Swarm Aruco Marker Vision Based Drone Hovering PID Inverted Pendulum Feedback Control