# import required libraries
import numpy as np
import cv2 as cv
import matplotlib.pyplot as plt
import time
# start timing program execution
start_time = time.time()
# function to draw epilines on our image
def drawlines(left_imgsrc, right_imgsrc, lines, pts1src, pts2src):
r, c = left_imgsrc.shape
left_imgcolor = cv.cvtColor(left_imgsrc, cv.COLOR_GRAY2BGR)
right_imgcolor = cv.cvtColor(right_imgsrc, cv.COLOR_GRAY2BGR)
np.random.seed(0)
for r, pt1, pt2 in zip(lines, pts1src, pts2src):
color = tuple(np.random.randint(0, 255, 3).tolist())
x0, y0 = map(int, [0, -r[2]/r[1]])
x1, y1 = map(int, [c, -(r[2]+r[0]*c)/r[1]])
left_imgcolor = cv.line(left_imgcolor, (x0, y0), (x1, y1), color, 1)
left_imgcolor = cv.circle(left_imgcolor, tuple(pt1), 5, color, -1)
right_imgcolor = cv.circle(right_imgcolor, tuple(pt2), 5, color, -1)
return left_imgcolor, right_imgcolor
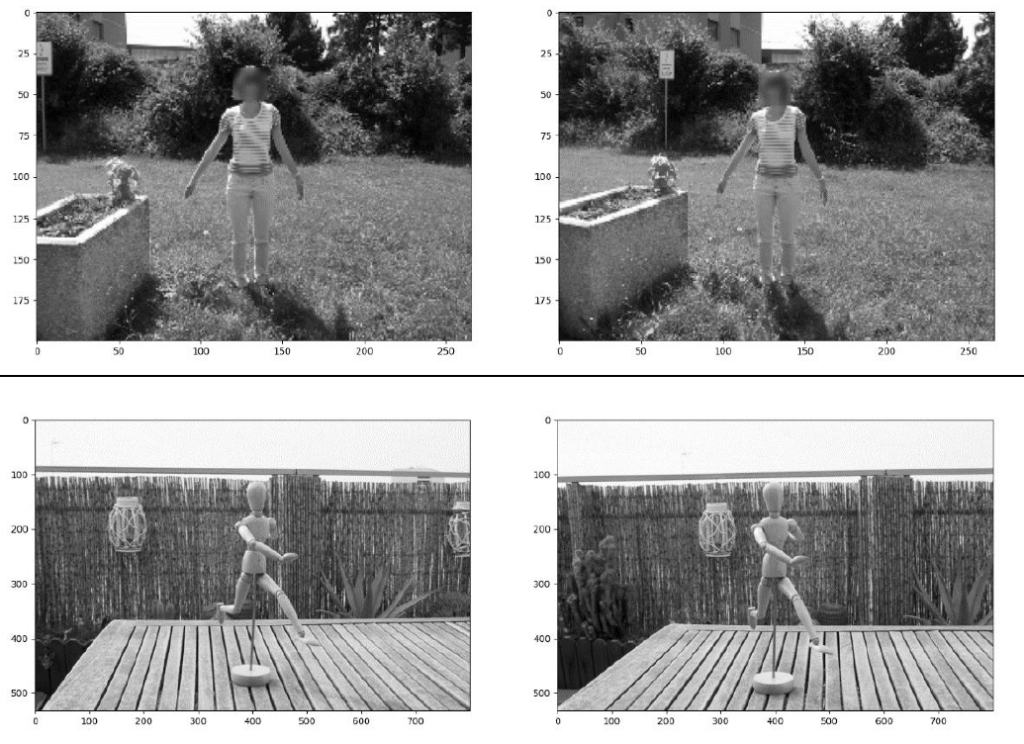
# Read both images and convert to grayscale
left_img = cv.imread('img_pair_2/image2_left.jpg', cv.IMREAD_GRAYSCALE)
right_img = cv.imread('img_pair_2/image2_right.jpg', cv.IMREAD_GRAYSCALE)
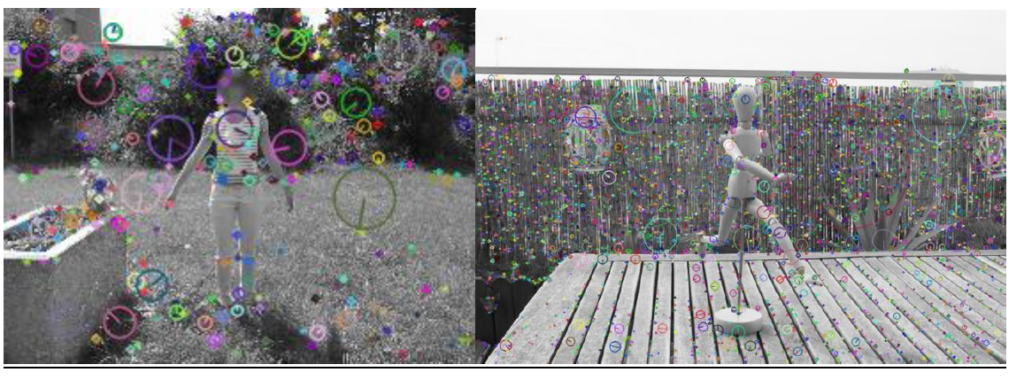
## Detecting Keypoints
# detect SIFT keypoints and descriptors
# Initialize SIFT detector
sift = cv.SIFT_create()
# find the keypoints and descriptors with SIFT
kp1, des1 = sift.detectAndCompute(left_img, None)
kp2, des2 = sift.detectAndCompute(right_img, None)
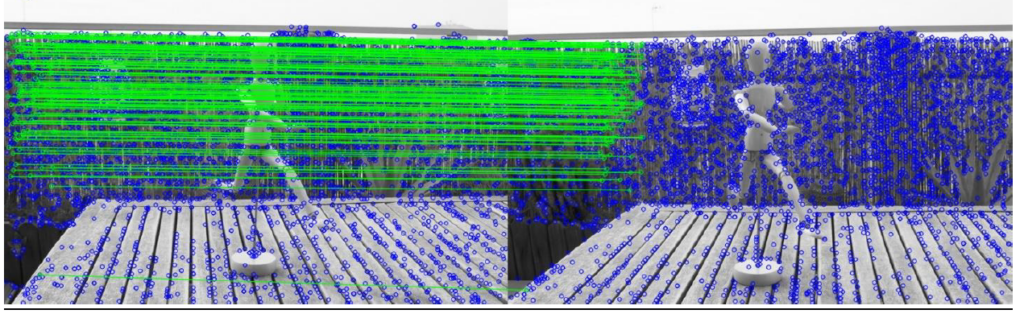
## Matching Keypoints
# match keypoints in left and right images using FLANN matcher
flann = cv.FlannBasedMatcher(dict(algorithm=1, trees=5), dict(checks=50))
matches = flann.knnMatch(des1, des2, k=2)
# keep good matches
matchesMask = [[0, 0] for i in range(len(matches))]
good = []
pts1 = []
pts2 = []
for i, (m, n) in enumerate(matches):
if m.distance < 0.7*n.distance:
# Keep this keypoint pair
matchesMask[i] = [1, 0]
good.append(m)
pts2.append(kp2[m.trainIdx].pt)
pts1.append(kp1[m.queryIdx].pt)
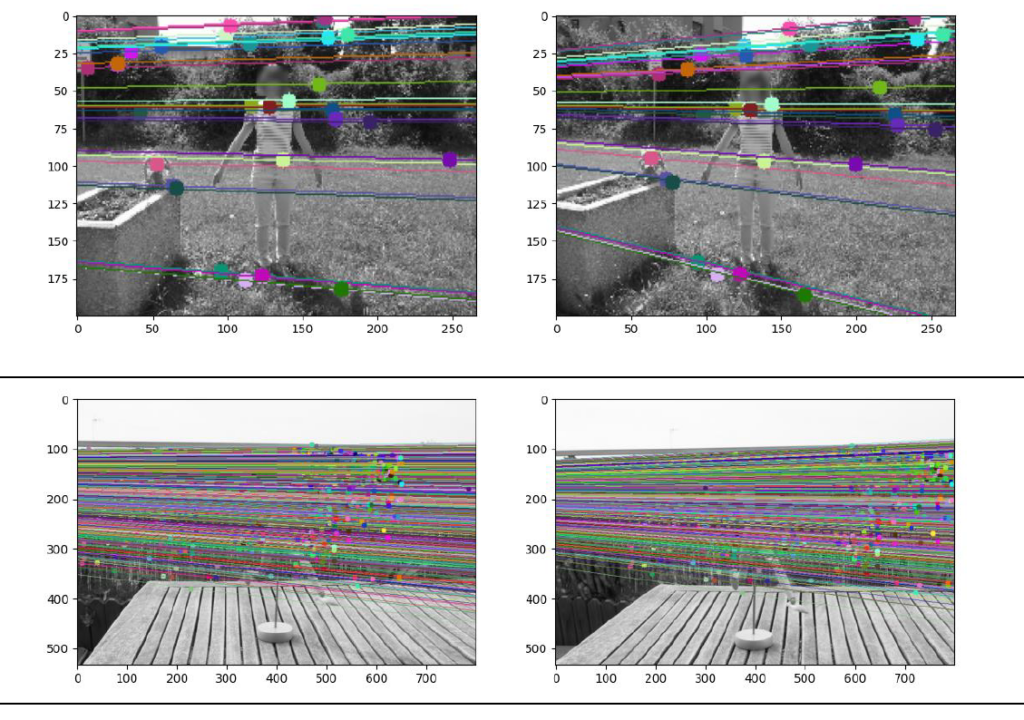
## Stereo Rectification
# calculate fundamental matrix using ransac
pts1 = np.int32(pts1)
pts2 = np.int32(pts2)
fundamental_matrix, inliers = cv.findFundamentalMat(pts1, pts2, cv.FM_RANSAC)
# select only inlier points
pts1 = pts1[inliers.ravel() == 1]
pts2 = pts2[inliers.ravel() == 1]
# visualize epilines
# Find epilines corresponding to points in right image (second image) and
# drawing its lines on left image
lines1 = cv.computeCorrespondEpilines(
pts2.reshape(-1, 1, 2), 2, fundamental_matrix)
lines1 = lines1.reshape(-1, 3)
img5, img6 = drawlines(left_img, right_img, lines1, pts1, pts2)
# Find epilines corresponding to points in left image (first image) and
# drawing its lines on right image
lines2 = cv.computeCorrespondEpilines(
pts1.reshape(-1, 1, 2), 1, fundamental_matrix)
lines2 = lines2.reshape(-1, 3)
img3, img4 = drawlines(right_img, left_img, lines2, pts2, pts1)
"""
plt.subplot(121), plt.imshow(img5)
plt.subplot(122), plt.imshow(img3)
plt.suptitle("Epilines in both images")
plt.show()
"""
# Stereo rectification from uncalibrated source
h1, w1 = left_img.shape
h2, w2 = right_img.shape
_, H1, H2 = cv.stereoRectifyUncalibrated(
np.float32(pts1), np.float32(pts2), fundamental_matrix, imgSize=(w1, h1)
)
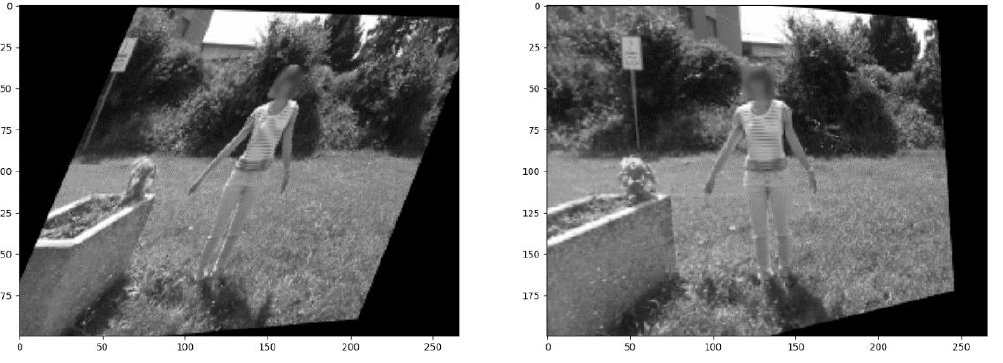
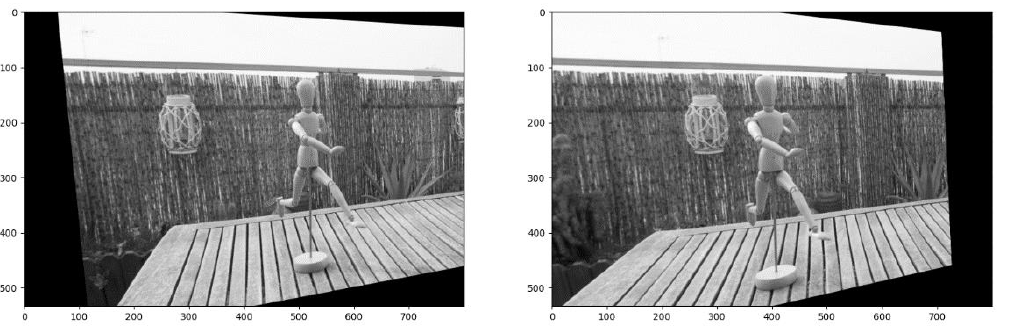
# rectify and save images
left_img_rectified = cv.warpPerspective(left_img, H1, (w1, h1))
right_img_rectified = cv.warpPerspective(right_img, H2, (w2, h2))
cv.imwrite("rectified_left.png", left_img_rectified)
cv.imwrite("rectified_right.png", right_img_rectified)
# print program execution time
print(" Program Execution Time: %s seconds" % (time.time() - start_time))
# Draw the rectified images
fig, axes = plt.subplots(1, 2, figsize=(15, 10))
axes[0].imshow(left_img_rectified, cmap="gray")
axes[1].imshow(right_img_rectified, cmap="gray")
plt.suptitle("Rectified images")
plt.savefig("rectified_images.png")
plt.show()